
- ygordom
- cnc pro
- Неактивен
- Откуда: Мурманск
- Зарегистрирован: 2016-08-17
- Сообщений: 10,189



Re: Перескок шаговиков при включении станка.
bossic72 сказал:
Утром прихожу, включаю, и в момент включения шаговики немного дёргаются, соответственно ноль теряется, на картинке полоса получается. Как нибудь с этим можно бороться?
Шаговики на самом деле никуда не смещаются когда Вы включаете станок на следующий день, просто подается напряжение на них, и появляется характерный звук типа стука - это нормально...
А полоса образуется из-за нескольких факторов, во первых за ночь может дерево немного повести - дерево такой материл, который влагу впитывает моментально.
Во вторых возможен "самоход" оси Z - когда Вы выключаете станок, с шаговиков "уходит" напряжение, и они могут крутиться без всяких усилий, т.е. под силой тяжести шпиндель тянет ось Z вниз, и фреза может просесть на десятые доли, отсюда и полоса. Это у всех так....
Советы: можно конечно не выключать станок, тогда позиционирование останется на месте - таким образом Вы избавитесь от самохода, но не застрахованы от того, что дерево поведет. Я делаю следующим образом, всегда возвращаю станок в ноль, и с утра намерено приподнимаю на несколько десятых фрезу вверх, затем начинаю работу, естественно получается ступенька, потом останавливаю, возвращаю опять в ноль, и опускаю на 0,1 мм. и проделываю эти операции до тех пор, пока ступенька - она-же полоса не исчезнут, на это требуется как правило 2-3 повторения по опусканию фрезы.
- cnc-master
- Администратор
- Неактивен
- Откуда: МОСКВА
- Зарегистрирован: 2014-12-08
- Сообщений: 777,777,856

Re: Перескок шаговиков при включении станка.
ygordom сказал:
шаговики немного дёргаются
при включении двигателя он становится в шаг , когда работает то он работает в микрошаге. Так и должно быть!
- cnc-master
- Администратор
- Неактивен
- Откуда: МОСКВА
- Зарегистрирован: 2014-12-08
- Сообщений: 777,777,856
Re: Перескок шаговиков при включении станка.
поможет только обнуление по оси зет . и не двигать кнопку обнуления она должна быть зафиксирована . Также можно чтобы выставить в ноль предварительно фрезеровать квадратик и когда выключили на этом квадратике посмотреть попали в ноль или нет пробу разные высоты !
- Зарегистрирован: 2017-08-12
- Сообщений: 179
Re: Перескок шаговиков при включении станка.
Как раз по Z проблем ни каких. Проблемы по Х и Y. Как было сказано выше, при подаче напруги движки становятся в шаг ( а иногда почему-то не становятся, или шаг не такой большой). Собрал наконец то большой станок, а он быстрый и мощный получился. На старом то маленьком эпилептике эта проблема была постольку-поскольку, а тут блин дёргаются оси иной раз на миллиметр. Во, надо попробовать на полушаге. Сейчас он пашет в 1/4 шага.
- ygordom
- cnc pro
- Неактивен
- Откуда: Мурманск
- Зарегистрирован: 2016-08-17
- Сообщений: 10,189
Re: Перескок шаговиков при включении станка.
bossic72 сказал:
Сейчас он пашет в 1/4 шага
Выставьте дробление 1/16, это оптимальное значение для драйверов.....
- Зарегистрирован: 2017-08-12
- Сообщений: 179
Re: Перескок шаговиков при включении станка.
ygordom сказал:
Выставьте дробление 1/16, это оптимальное значение для драйверов.....
Пробовал, разницы по сравнению с 1/4 не увидел никакой.
8 2018-08-20 12:32:44 (изменено: , 2018-08-20 12:35:14)
- cnc-master
- Администратор
- Неактивен
- Откуда: МОСКВА
- Зарегистрирован: 2014-12-08
- Сообщений: 777,777,856
Re: Перескок шаговиков при включении станка.
Любой микрошаг не даст разницы , при включение все двигатели становятся в шаг!
а микрошаг даёт дробление микрошага, потом когда начинает работать двигатель ! от этого не уйти . никак только цифровые линейки или специальные Энкодеры
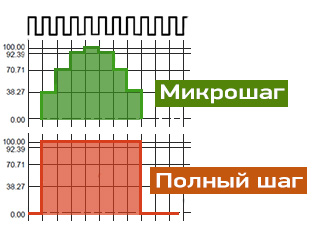
Микрошаг - режим деления шага шагового двигателя, когда обмотки мотора запитаны не полным током, а его уровнями, изменяющимися по закону sin в одной фазе и cos во второй.
микрошаговый режим шагового двигателя
В общем случае под микрошагом понимают микрошаговый режим управления шаговым двигателем, иначе говоря - режим деления шага. Микрошаговый режим отличается от штатного режима управления двигателем тем, что в каждый момент времени обмотки шагового мотора запитаны не полным током, а некими его уровнями, изменяющимися по закону sin в одной фазе и cos во второй. Такой метод дает возможность фиксировать вал в промежуточных положениях между шагами. Количество таких положений задается настройками драйвера. Скажем, режим микрошага 1:8 означает, что с каждым поданным импульсом STEP драйвер будет перемещать вал примерно на 1/8 полного шага, и для полного оборота вала потребуется подать в 8 раз больше импульсов, чем для режима полного шага.
ПРИМЕНЕНИЕ МИКРОШАГОВОГО РЕЖИМА
У микрошагового режима может быть несколько применений.
Вначале разберем несколько заблуждений относительно микрошага:
Микрошаг позволяет увеличить точность привода.
На самом деле это не так. Во-первых, этому мешает геометрическая неидеальность ротора и статора двигателя, неидеальные обмотки, зазоры в подшипниках вала и т.п. В результате двигатель выполняет шаги всегда с некоторой погрешностью(как правило, 5% от величины полного шага), причем абсолютное значение погрешности постоянно для любого выбранного микрошагового режима! Кроме того, во многих драйверах управление двигателем также далеко от идеального, что приводит к дополнительной неравномерности перемещения в режиме микрошага. Дальнейшее деление шага более чем на 5-10 микрошагов приводит только к увеличению разрешающей способности привода, но не точности. То есть вы сможете более дискретно задавать позицию в ЧПУ системе, но не сможете её получить с заданной точностью.
Микрошаг значительно снижает момент двигателя(относительно полношагового режима).
Момент действительно снижается. Однако, использование микрошага одновременно увеличивает плавность хода двигателя, и снижает резонансные явления, что способствует увеличению момента. Два противоположных влияния на момент в среднем более-менее уравновешивают друг друга. В многих случаях применение микрошага на самом деле увеличивает момент, поэтому целесообразность отказа от микрошагового режима должна определяться в каждом конкретном случае.
Основным применением микрошагового режима является борьба с резонансом, снижение вибрации шагового двигателя и повышения плавности хода передачи. Достигается это благодаря тому, что при использовании микрошагового режима на вал мотора действуют более кратковременные усилия разгона-торможения, сам вал совершает шаги меньшей амплитуды, в результате инерционные явления проявлены слабее.
ВЫБОР ОПТИМАЛЬНОГО РЕЖИМА ДЕЛЕНИЯ ШАГА
Оптимальный режим деления шага необходимо выбирать в зависимости от конкретного станка и стоящих задач. Основными факторами являются необходимость снизить резонанс двигателей, уменьшить шум, разрешающую способность станка. В большинстве случаев имеет смысл использовать наибольшее деление шага, при котором станок сможет развивать расчетную максимальную скорость. Ограничением в данном случае будет максимальная частота входных импульсов у драйвера или максимальная частота генерации управляющих импульсов ЧПУ-системой. Скажем, скорость вращения 10 об/сек стандартного двигателя с шагом 1.8 град требует подавать импульсы STEP с частотой 2000 Гц для режима полного шага и с частотой 256 КГц для деления шага 1:128, тогда как, например, программа Mach3 максимально может генерировать импульсы с частотой 100 Гц.
МИКРОШАГОВЫЙ РЕЖИМ ДРАЙВЕРОВ LEADSHINE
Цифровые драйверы Leadshine построены с применением особой технологии - драйверы всегда используют максимальный режим деления шага. Установка микрошагового режима на самом деле указывает множитель - сколько микрошагов надо совершить на каждый импульс STEP. Такая технология позволяет добиться максимальной плавности движения при любых установках режима деления шага и максимально устранить вибрации шагового двигателя.